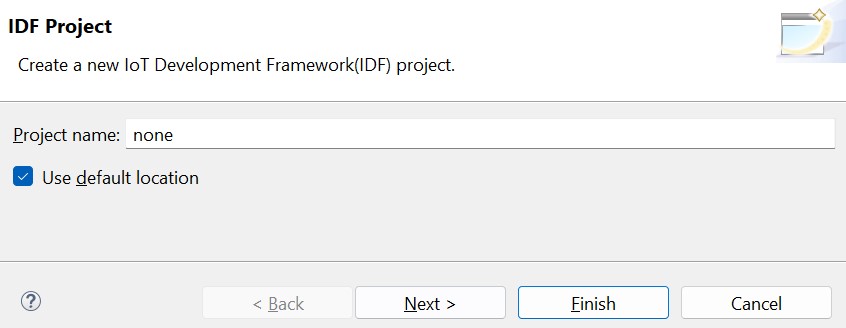
Es wird ein Wizard geöffnet, in dem Sie einen beliebigen Projektnamen eingeben können. Dieser Name wird im Anschluss durch den Namen der Demoapplikation ersetzt.
Drücken Sie „Next“ und wählen Sie das Beispiel hello_world aus. Dafür muss „Create a project using one of the templates“ angehakt und das Projekt angeklickt werden.
FlexiPlot ist ein angenehmes Werkzeug zur Darstellung von Daten. Im Entwicklungsprozess ist es, wie auch in Kapitel 8.2, oft notwendig, sich ein Bild der Daten zu machen, um Trends festzustellen oder die Arbeitsweise der Datenverarbeitung mit Filtern zu visualisieren.
Besonders die einfache Verwendung machen FlexiPlot interessant. Nach dem Start erhält man eine Oberfläche, auf der man mit „Add Line Graph“ oder „Add Bar Graph“ Fenster für die beiden Graphentypen öffnen kann. Im „Settings“-Tab eines Graphen stellt man das visuelle Erscheinungsbild sowie den Namen der zugehörigen Daten ein.
Für Abb. 8.4 des Buchs wurde ein Liniengraph mit der ID P0 hinzugefügt. Als „Title“ wurde „ADC Voltage“, als „Name of X Axis“ „Zeit“, als „Name of Y Axis“ „mV“ gesetzt. Der Typ ist ein „Time Plot“. Wird das Tool mit dem seriellen Port des ESP32-C3 verbunden, wird dessen Ausgabe direkt im Graph angezeigt.
Das Beispiel servocontrol schreibt in der Codezeile
in den Graphen P0 die drei Einträge für voltage_mv, firValue_2, firValue_10 und iirValue (im Buch aus Übersichtlichkeitsgründen nicht iirValue). Ein Eintrag besteht aus einem Namen, beispielweise RAW, einer RGB-Farbe für die Darstellungen und dem Wert.
Im Beispiel Servocontrol werden zusätzlich die Graphen P1 und P2 verwendet, um den berechneten Widerstandswert und die berechnete Helligkeit anzuzeigen. Die Einstellungen für FlexiPlot sind dem Code des Beispiels im Verzeichnis flexiplot (servocontrol.dash) angefügt.
Über weitere Möglichkeiten des Werkzeugs gibt dessen Webseite Auskunft.
Damit die esp-dsp-Bibliothek kompiliert werden kann, muss die in der Datei idf_component.yml im Verzeichnis main als dependency angegeben werden:
espressif/esp-dsp: "^1.2.0"
Außerdem kompiliert die Bibliothek in V 5.0 des ESP-IDF nicht mehr direkt. Zur Behebung kann der Compiler-Fehler in der Datei CMakeLists.txt im Projektverzeichnis abgeschaltet werden:
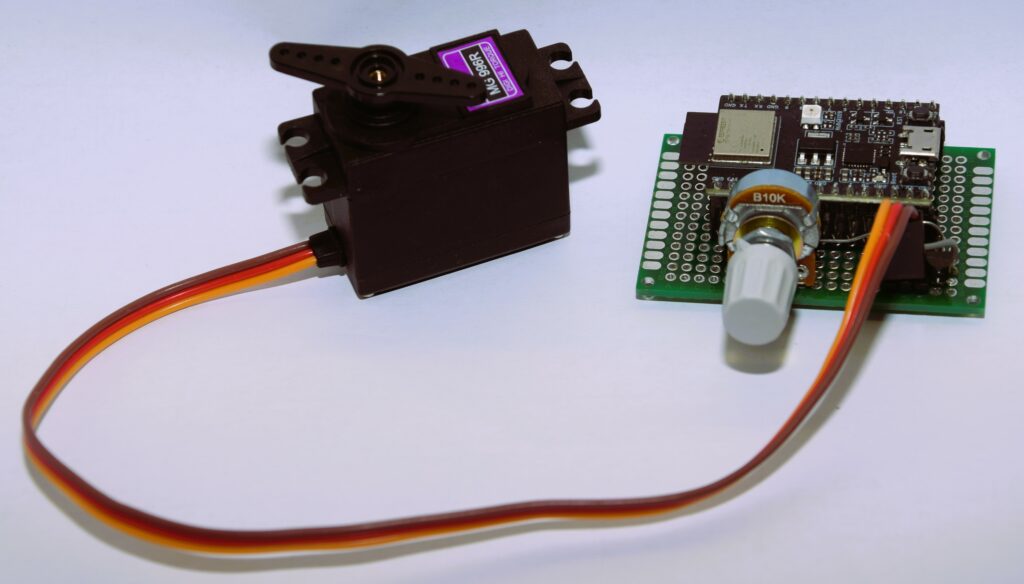
Die Applikation servocontrol verwendet ein Potentiometer (mit 10 kOhm) und ein handelsübliches Modellbauservo: Über ein Drehen des Potentiometers wird die Helligkeit der LED und die Stellung des Servos verändert, wie im folgenden Video gezeigt.
Das Beispiel dient als Referenzimplementierung der Kapitel
Kapitel 8.1.3, „Messen am Spannungsteiler“
Kapitel 8.2, „Werte filtern“
Kapitel 8.5.4, „Pulsweitenmodulation (PWM)“
Schaltungsaufbau
Schaltungsaufbau am Steckbrett
Das Potentiometer links ist wie in Kapitel 8.1.3 besprochen über einen Spannungsteiler versorgt. Es wird GPIO2 als ADC-Eingang verwendet. Der Anschluss des Servos ist in Kapitel 8.5.4 mit der „Level Conversion“ durch den Transistor beschrieben. Als Pull-Up wird ein 10 kOhm-Widerstand verwendet, eine Strombegrenzung vom Ausgang GPIO3 zur Basis des Schalttransistors übernimmt ein 1 kOhm-Widerstand.
Schaltungsaufbau auf eine Lochrasterplatine gelötet
Sourcecode
components/ringbuffer
enthält die Implementierung eines Ringpuffers als abstrakter Datentyp, wie er in Kapitel 8.2.1 beschrieben wird.
components/filter
enthält Implementierungen eines allgemeinen Filters mit den polymorphen „Unterklassen“ FIRFilter und IIRFilter, wie er in Kapitel 8.2.1 beschrieben wird.
main
baut auf dem ADC-Beispiel des ESP-IDF auf. Kanal 2 von ADC 1, der auf GPIO 2 geleitet ist, wird in der Hauptschleife zyklisch mit einer Periode von 50 ms ausgelesen und in drei Filter, nämlich einen moving average FIRFilter 2. Ordnung, einen moving averge FIRFilter 10. Ordnung und einen IIRFilter 2. Ordnung geleitet. Über die Einstellung „use filter for servo control“ in der „servocontrol Configuration“ kann gewählt werden, welche Filterausgabe anschließend zum Stellen des Servos (und der LED-Helligkeit) verwendet wird.
Die Filterwerte werden per printf() auf der Konsole ausgegeben. Es ist nun möglich, die Daten per FlexiPlot auszuwerten (siehe Kapitel 8.2).
Bei Conways Game of Life handelt es sich um ein Spiel basierend auf einem zweidimensionalen zellulären Automaten (siehe Game of Life).
Basierend auf einfachen Regeln der Nachbarschaft pflanzen sich Zellen in der nächsten Generation fort, stirbt ab oder vermehrt sich. So können Populationen beobachtet werden.
Die Implementierung auf dem ESP32-C3 verwendet ein Entwicklerboard mit einer 5×5 LED-Matrix. Zellen, die neu entstehen, leuchten blau. Absterbende Zellen leuchten rot, und fortbestehende grün.
Conways Game of Life auf einem Board mit 5×5 LEDs
Die in main.c untergebrachte Implementierung erzeugt mit generateGame() ein neues Zellenmuster. In der Konfiguration ist einstellbar, ob das Spielfeld zufällig (CONFIG_INITIALIZE_GAMEFIELD_RANDOM), mit einem oszillierenden Objekt (CONFIG_INITIALIZE_GAMEFIELD_OSCILLATING) oder einem Gleiter-Objekt (CONFIG_INITIALIZE_GAMEFIELD_GLIDER) initialisiert wird.
Konfigurierung der Spielfeld-Initialisierung
In der Hauptschleife wird alle 10 ms das aktuelle Spielfeld, falls verändert, an die WS2812-LEDs gesendet. Ein Timer ruft alle 20 ms die Funktion displayGameState() auf, die die Pixel „zeichnet“: blaue Pixel werden schrittweise langsam heller, rote schrittweise dunkler. Bei jedem 50. Aufruf (i.e. jede Sekunde) wird die Funktion calculateGeneration() aufgerufen, um eine neue Generation auf einem dynamisch neu erstellten Spielfeld aus der bestehenden Generation abzuleiten.
Da das Spielfeld mit 5×5 Zellen recht klein ist, sind der linke und der rechte Rand, sowie der obere und der untere Rand direkt benachbart. Links benachbart zu einem Pixel in der linksten Spalte ist also beispielsweise ein Pixel in der rechtesten Spalte.
Komponente esp_lcd: Diese Komponente wird im ESP-IDF bereitgestellt
Diese Komponente wurde im Rahmen des Pulsoximeter-Beispiels entwickelt und wird hier bereitgestellt.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.